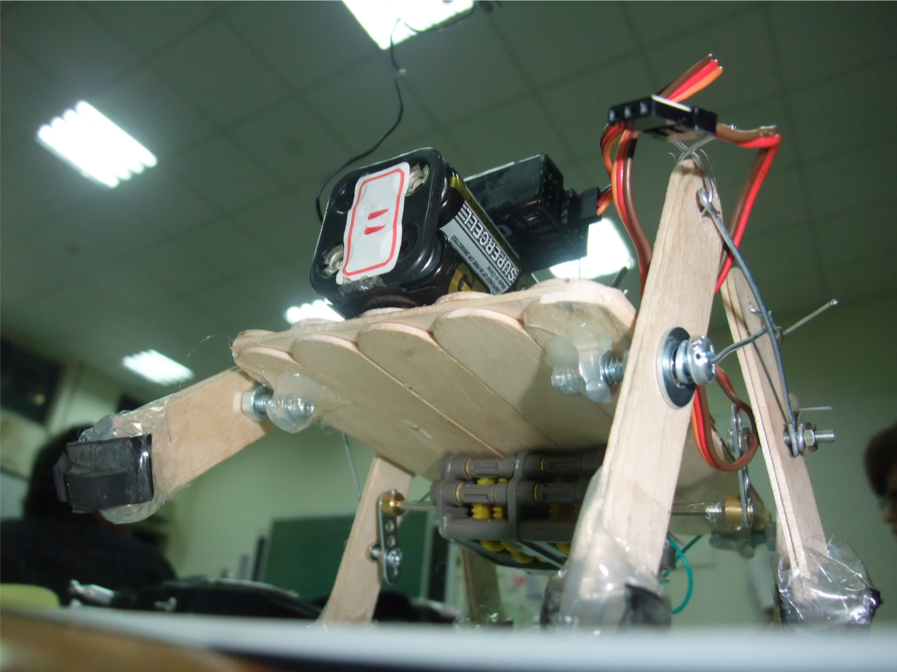
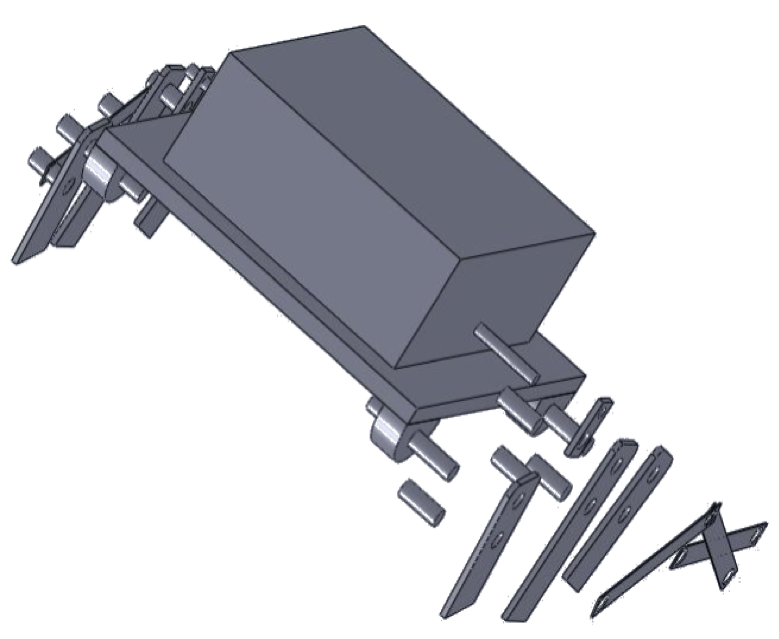
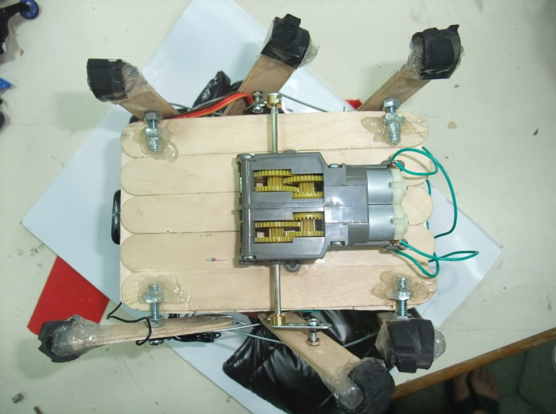
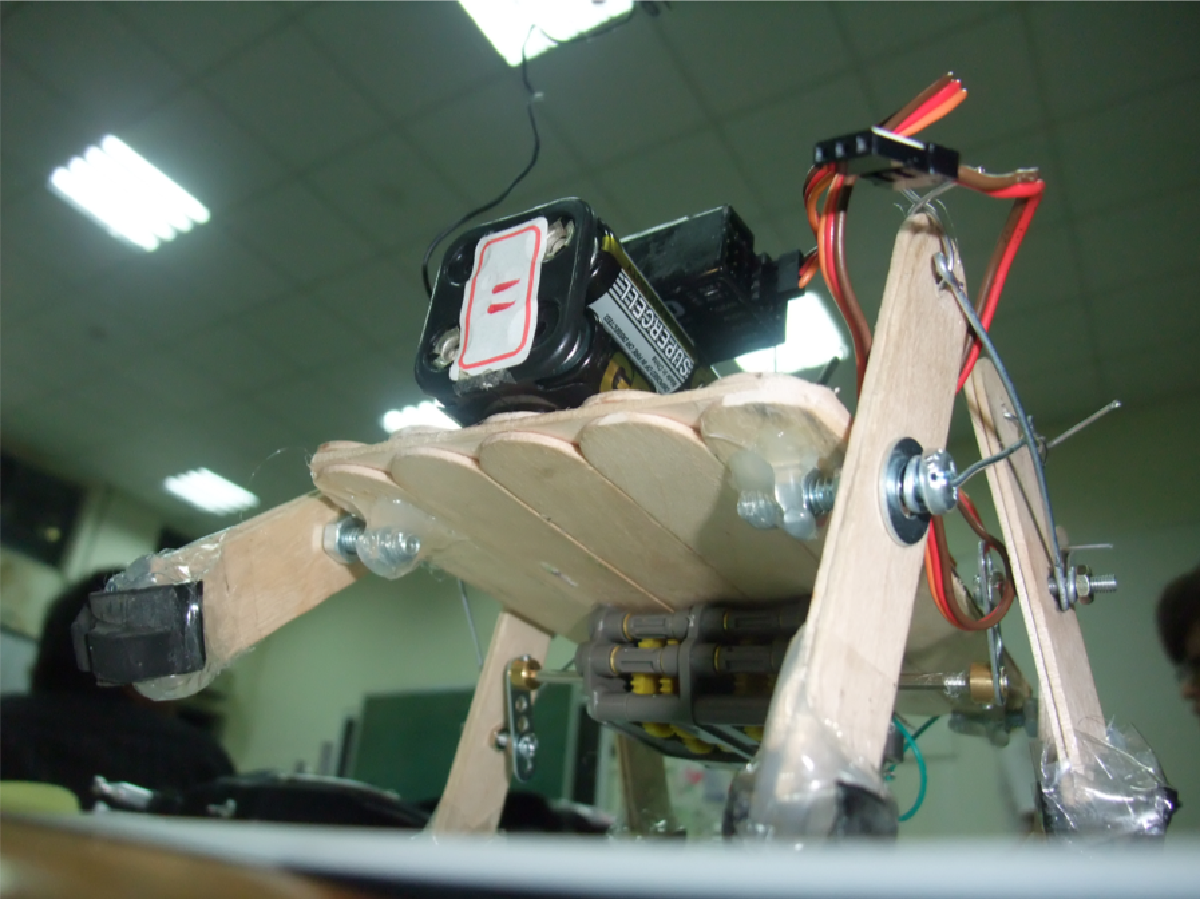
Designed & Built a remote-controllable robot inspired by HEXBUG in a 5 members’ team, with basic functions including walking, turning, climbing gentle slope.

Designed & Built a remote-controllable robot inspired by HEXBUG in a 5 members’ team, with basic functions including walking, turning, climbing gentle slope.