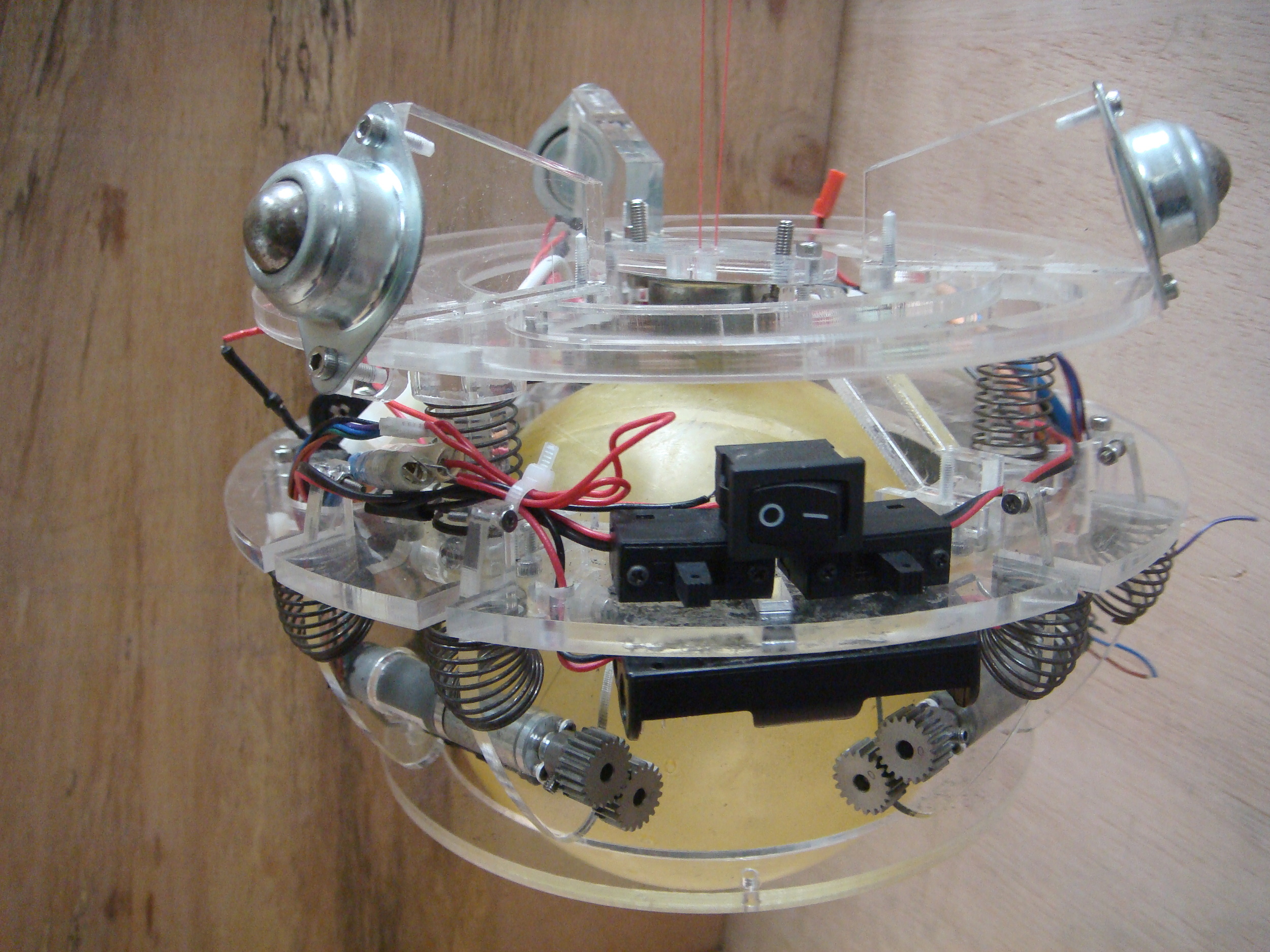
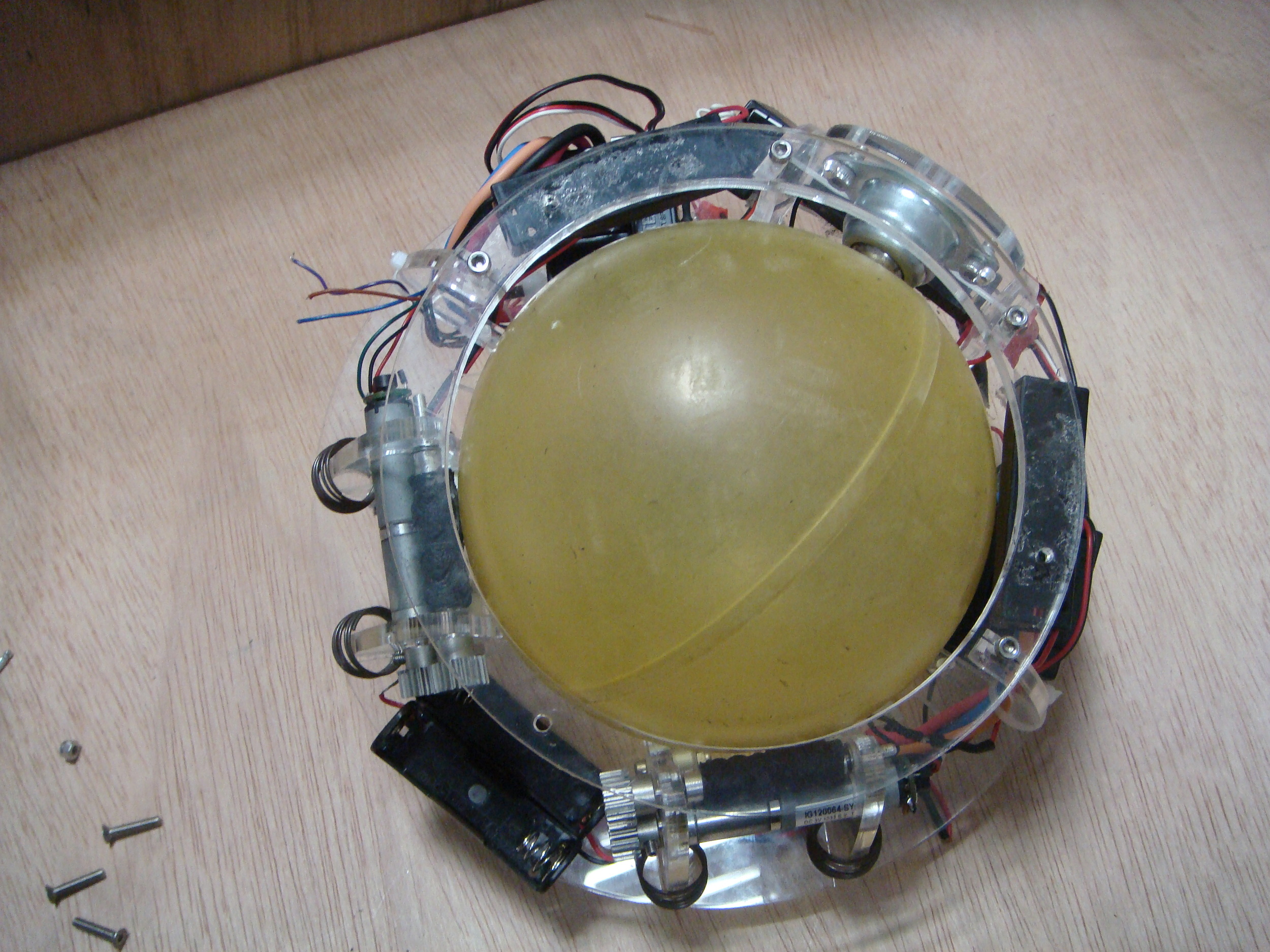
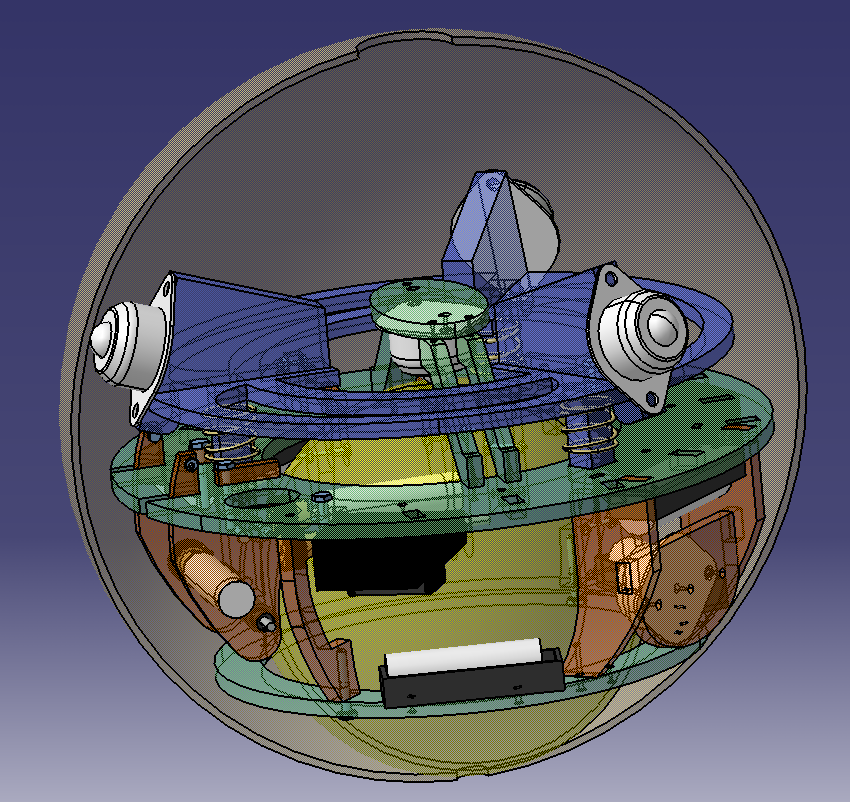
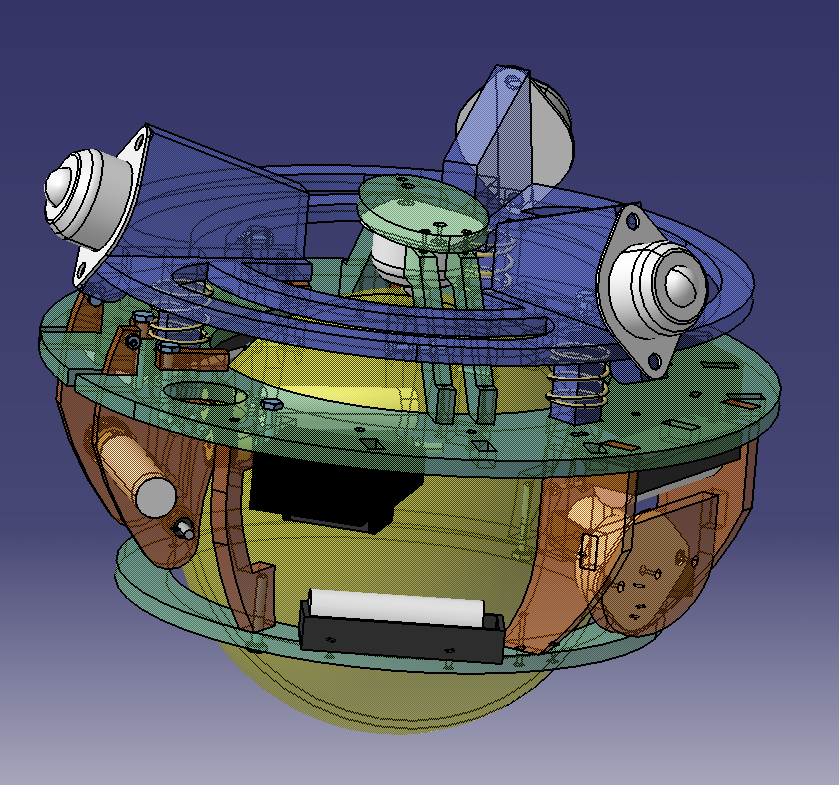
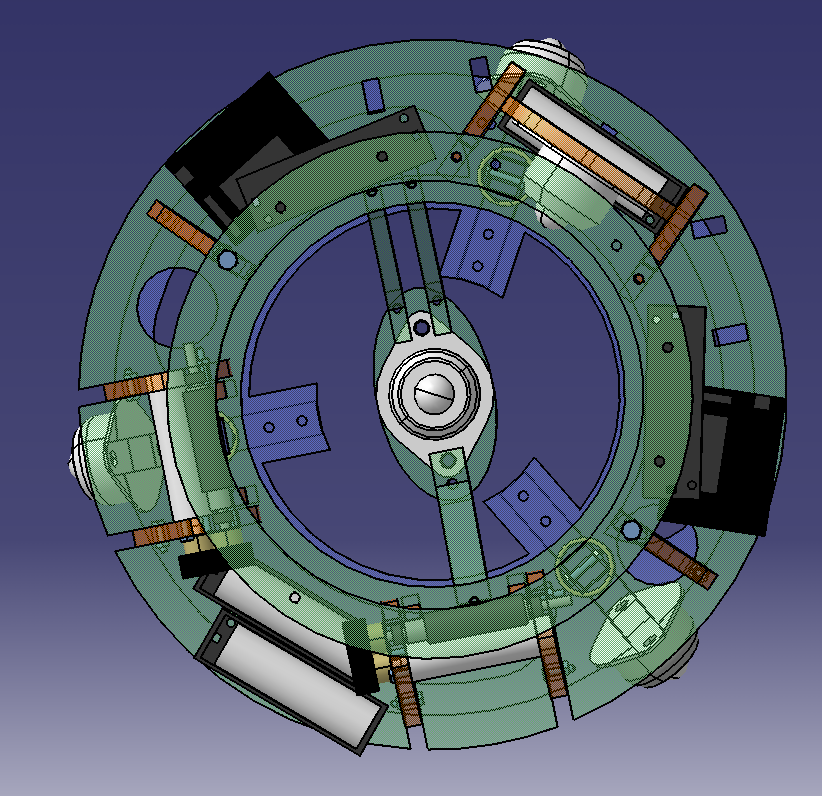
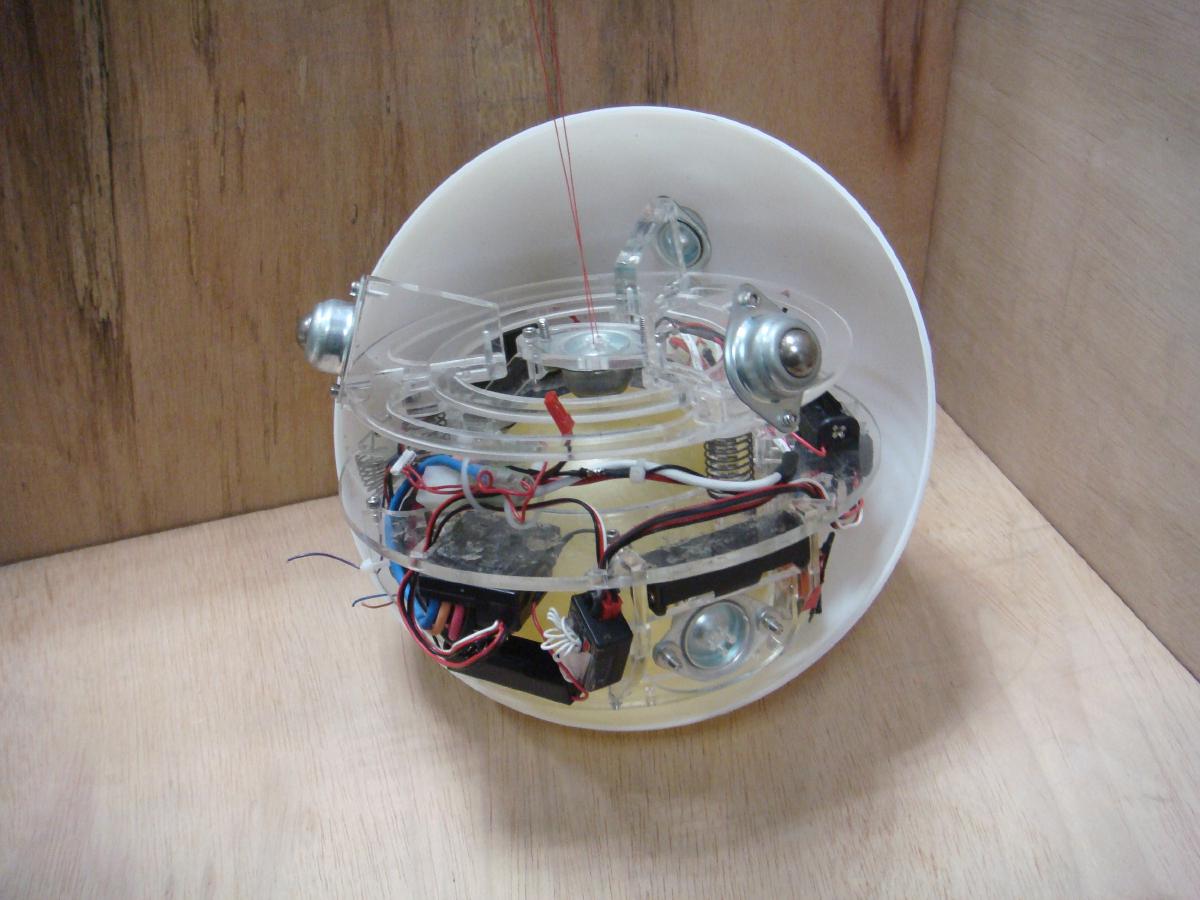
/Engineer/TWaltz/TWaltz2011-03-14Robot Mechanical EngineeringBuilt a ball-shape robot driven by 2 perpendicular motors in a 4 members’ team. Used acrylic and plastic balls. document